
Raph Rover:
Versitale Foundation for Advanced Research
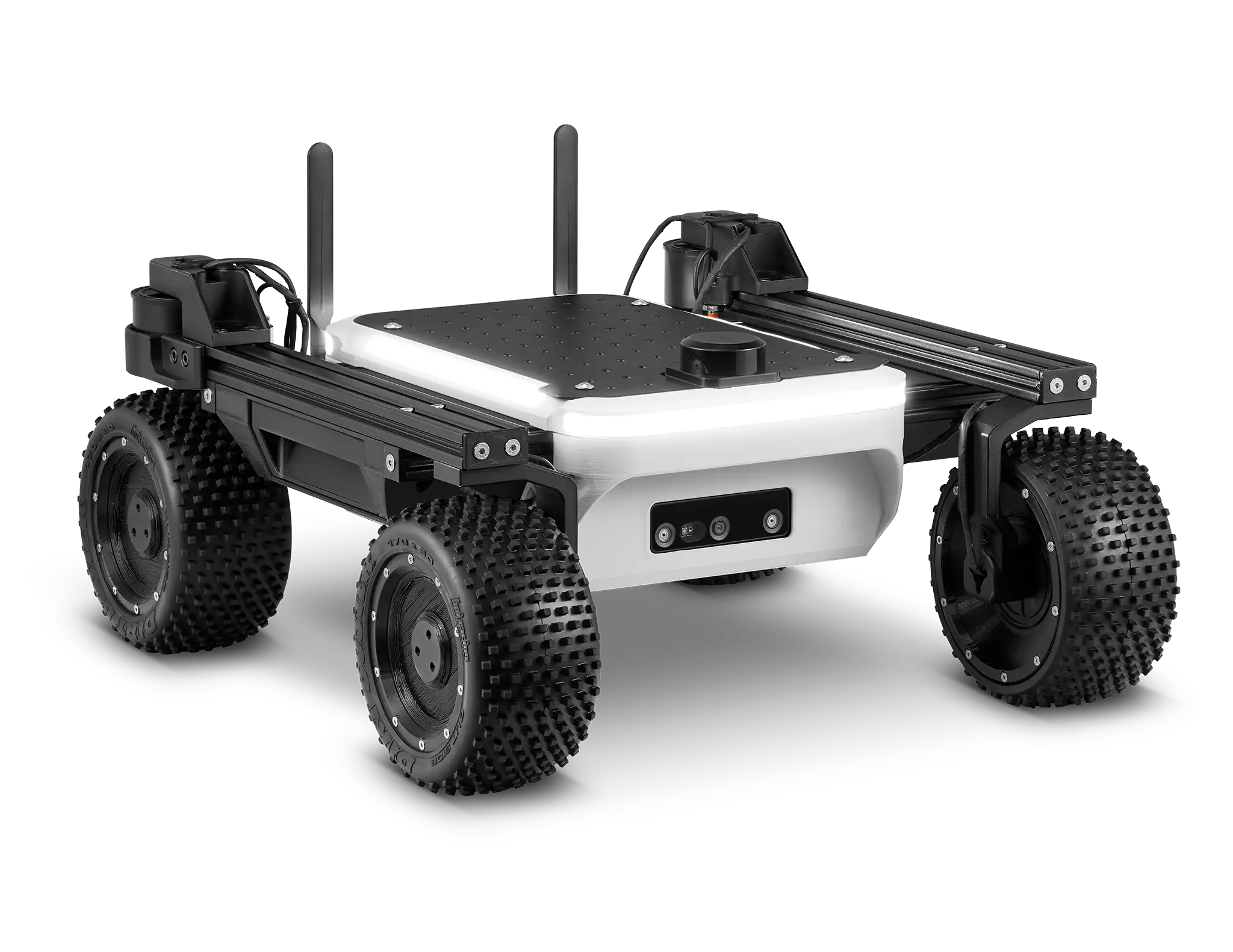
A modular, ROS-native UGV featuring Ackermann steering and integrated sensor suites for researchers demanding precision odometry and higher payload capabilities.
Built for real-world challenges
Building on the field-proven architecture of the Leo Rover, Raph Rover represents a shift toward autonomy. It is designed to bridge the gap between robotics research and real deployment. With a 10kg payload capacity and a refined Ackermann steering , it provides the odometry accuracy required for precise mapping and localization. Whether navigating narrow agricultural rows or complex industrial floors.

Working with FLOX
Learn how a Leo Rover became just the robot poultry farms need.

CES 2019 Seagate booth – Impact Creative
Here's a bit about Turtle Rover as an exhibition robot at CES 2019 in Las Vegas.
Going to Fukushima
Here's how a Leo Rover got to map the radiation level in Fukushima, Japan.

Leo Rovers on display – a few words about a special custom project
Discover how Leo Rover robots turned into Martian rovers for a museum.

Leo Rover conquers the Moon once more – the final round of the Space Resources Challenge
See how the Leo Rover robots of the LUVMI-XR team tackled the finals of the Space Resources Challenge.

Reach for the stars in Luxembourg
Learn about the Interdisciplinary Space Master program at the University of Luxembourg.
Raph Rover
Features Preview



Open source | ROS based | Open to community
open_source
We believe that a robot you cannot modify is not truly yours. Our software and firmware are open to the core, providing the transparency required for R&D. This transparent architecture ensures you are never restricted by proprietary silos, allowing your team to fork, modify, and optimize the stack for project specific requirements. MIT Licensed.
modular_
architecture_
and_integration
The software environment is specifically designed to act as a central hub for your payloads, offering support for sensors, actuators, and external compute modules. We provide integration tutorials for a wide array of third-party components already documented in our knowledge base, significantly accelerating your integration timeline.
ros2_framework
Our platforms are not just "compatible" with ROS 2; they are built natively on it. This ensures that your existing libraries, custom nodes, and community packages work out of the box
documentation_
and_support
We move beyond being a hardware vendor by acting as an extension of your development team through our comprehensive documentation and human-to-human technical assistance. Our "never stuck" philosophy ensures that when real-world robotics challenges arise, you gain direct access to the engineers who designed the system to help you debug and harden your mission-critical logic. From initial networking setup to advanced system-level integration, our living knowledge base at docs.fictionlab.pl serves as your primary resource for rapid troubleshooting and scaling.
community_
ecosystem
Robotics is too complex to do in a vacuum, so we run our community on Discord. It’s where the actual day-to-day exchange happens—no support tickets, just direct access to our core engineering team and a global network of peers. Whether you’re troubleshooting a niche driver issue, sharing a custom autonomous stack for your PhD, or looking for advice on a specific sensor fusion approach, the Discord channels are where you’ll find people who speak your language. It’s an active space for geeking out over hardware and getting real-time answers from people who have been in the same trenches.
contribute_
and_collaborate
We invite you to help us improve the rovers. Your pull requests and feedback directly influence the software stack, helping us improve it for the global community.
Get your Raph Rover

Raph Rover 1.0
Accelerate your transition from lab to field. The Raph Rover is delivered exclusively as a fully assembled, calibrated system, ensuring that your team can focus on advanced navigation logic and sensor fusion from day one.
Select configuration:
Get your Raph
Looking for a smaller rover? Discover Leo Rover!
Discover the filed-proven Leo Rover platform.

In need of a robot for special tasks? Learn more about Custom Robotics Services!
Bridge the gap between concept and reality with our team support. If your application requires a unique form factor or specialized mechanics, we leverage a decade of full-stack expertise to design and build your bespoke robotic solution.
Built for Developers,
Supported by Experts
Community
The true potential of our rovers isn't found in our lab, but in the hands of the global community. For 10 years, developers and researchers have shared their breakthroughs, making every mission easier for the next person to begin.
Join CommunityTechnical Support & Resources
We never leave a partner stuck. Access comprehensive technical documentation, schematics, and direct expert assistance to ensure your mission maintains its momentum.
Explore documentation| Project nameCustomer Support |
Sheet1/1 | |||
| Approved byFictionlab Team | Established2017 | Documentationdocs.fictionlab.pl | ||
|
Social media
LinkedIn
YouTube Reading Room |
Community Discord | |||
| Code repositories Github | ||||
FREQUENTLY ASKED QUESTIONS
Raph Rover
3D printing allows us to quickly improve the design of plastic parts if necessary. In addition, we provide our customers with CAD files so that they can modify parts according to their needs or print replacements if any parts are damaged. The most important structural elements of the rover are made of metal.
The platform operates on Ubuntu 24.04 LTS and uses ROS 2 Jazzy as its core framework. Users can control and monitor the system through a web-based interface accessible over Wi-Fi.
The standard framework installed on the robot is ROS 2 Jazzy. Raph Rover doesn't support ROS 1 as it is already End-of-Life.
General
Fictionlab is a Polish (European Union) company based in Wrocław. Both production and product development are located there.
Yes, all of our products are designed to be modified, and you are encouraged to tinker with it and adjust it for your projects. We support a 'Right to Repair & Hack' philosophy, meaning such modifications do not void your access to support.

Raph Mobile Robots: Raph Rover as a Practical Base for Field Autonomy
Raph Rover is a ground robot platform designed for teams who need a dependable UGV foundation for research, prototyping, and real-world pilots. Within the Raph Mobile Robots lineup, it fits projects where mobility, payload flexibility, and ROS-based development matter more than flashy demos. The goal is straightforward: provide a mobile base that helps you move from “it works in simulation” to “it works outside”.
What Raph Rover is (and what it’s for)
Raph Rover is a modular unmanned ground vehicle that can be adapted to different missions by changing sensors, compute, and payload modules. In practice, it’s used as a robotics “workhorse” for:
- autonomy validation in outdoor or semi-structured environments,
- navigation development (mapping, localization, obstacle avoidance),
- inspection and monitoring tasks,
- research projects that require repeatable field testing.
If you’re looking for Raph Mobile Robots solutions that support both rapid iteration and longer-term integration, this platform is intended to reduce engineering friction around the base vehicle so the team can focus on perception, planning, and mission logic.
Why teams choose Raph Mobile Robots for UGV development
UGV projects often fail on integration details: inconsistent interfaces, limited payload options, or a platform that can’t carry the sensors you actually need. Raph Rover is positioned to solve common blockers:
- Modularity first: easier sensor swaps and mission-specific payload setups.
- ROS-friendly development: supports workflows that robotics teams already use.
- Field-ready mindset: built for repeated testing, not one-off demos.
For SEO and clarity: when people search “Raph Mobile Robots,” they typically want a platform that can be extended rather than a closed product. This is exactly where Raph Rover is meant to land.
Key capabilities that matter in real deployments
A mobile robot is only as useful as the consistency of its behavior under load and in varied conditions. The platform concept here is based on enabling stable navigation and reliable data collection.
Navigation and autonomy foundation
Raph Rover is suited to autonomy stacks that rely on mapping and localization pipelines (e.g., SLAM + navigation). Teams can iterate quickly on perception and planning while keeping the base platform stable across tests.
Payload flexibility for sensors and mission hardware
Whether you’re integrating LiDAR, depth cameras, GNSS/RTK, additional compute, or mission tools, the key requirement is physical and electrical integration flexibility. Raph Rover’s modular approach supports that kind of build-out without redesigning the whole system.
Practical field testing
Field testing isn’t just “can it drive.” It’s repeatability, logging quality, predictable power behavior, and the ability to mount what you need. That’s the kind of checklist this UGV category is expected to meet.
Typical use cases for Raph Rover
Raph Rover is a good match when the mission requires mobility plus reliable sensing in environments that aren’t perfectly controlled.
Robotics R&D and autonomy prototyping
Ideal for labs and development teams running iterative experiments-collecting datasets, tuning navigation, and validating autonomy behavior.
Inspection and monitoring workflows
Suitable as a mobile base for perimeter monitoring, facility inspection support, and routine sensing runs where consistent paths and data capture are important.
Education, labs, and pilot deployments
Works as a training and prototyping platform for ROS-based teams that want a real robot that can be adapted to different learning and pilot scenarios.
How to evaluate if Raph Rover is the right Raph Mobile Robots platform
Before choosing a UGV base, it helps to check fit against real constraints:
- Environment: indoor, outdoor, mixed terrain, inclines, weather exposure.
- Sensor stack: LiDAR/cameras/GNSS, mounting positions, required viewpoints.
- Compute needs: onboard GPU/CPU, thermal constraints, power draw.
- Payload needs: weight, dimensions, vibration sensitivity.
- Autonomy target: teleop → assisted autonomy → full autonomy.
If your requirements span multiple mission profiles, the “platform-first” approach associated with Raph Mobile Robots generally reduces rework, because the base remains consistent while the mission layer evolves.
Integration notes (ROS 2 and system approach)
Raph Rover is best treated as a foundation that plugs into a modern robotics workflow:
- ROS 2-based navigation and perception stacks,
- modular sensor integration and iterative calibration,
- structured logging for field runs and dataset building,
- repeatable deployment cycles (prototype → pilot → scaled usage).
This makes it easier to keep the software architecture clean: your autonomy stack becomes portable across configurations, and the robot remains a stable reference system.
Next steps
If you’re evaluating Raph Mobile Robots for a UGV platform that can carry your sensor stack, support autonomy development, and stay stable across field tests, Raph Rover is a strong starting point. Define your payload and environment requirements first-then design the integration around the mission, not around the limitations of the base.