Added to your quote request
This item has been added to your quote request.You can continue browsing or review your request at any time.
Fixposition Vision-RTK 2 – Leo Integration
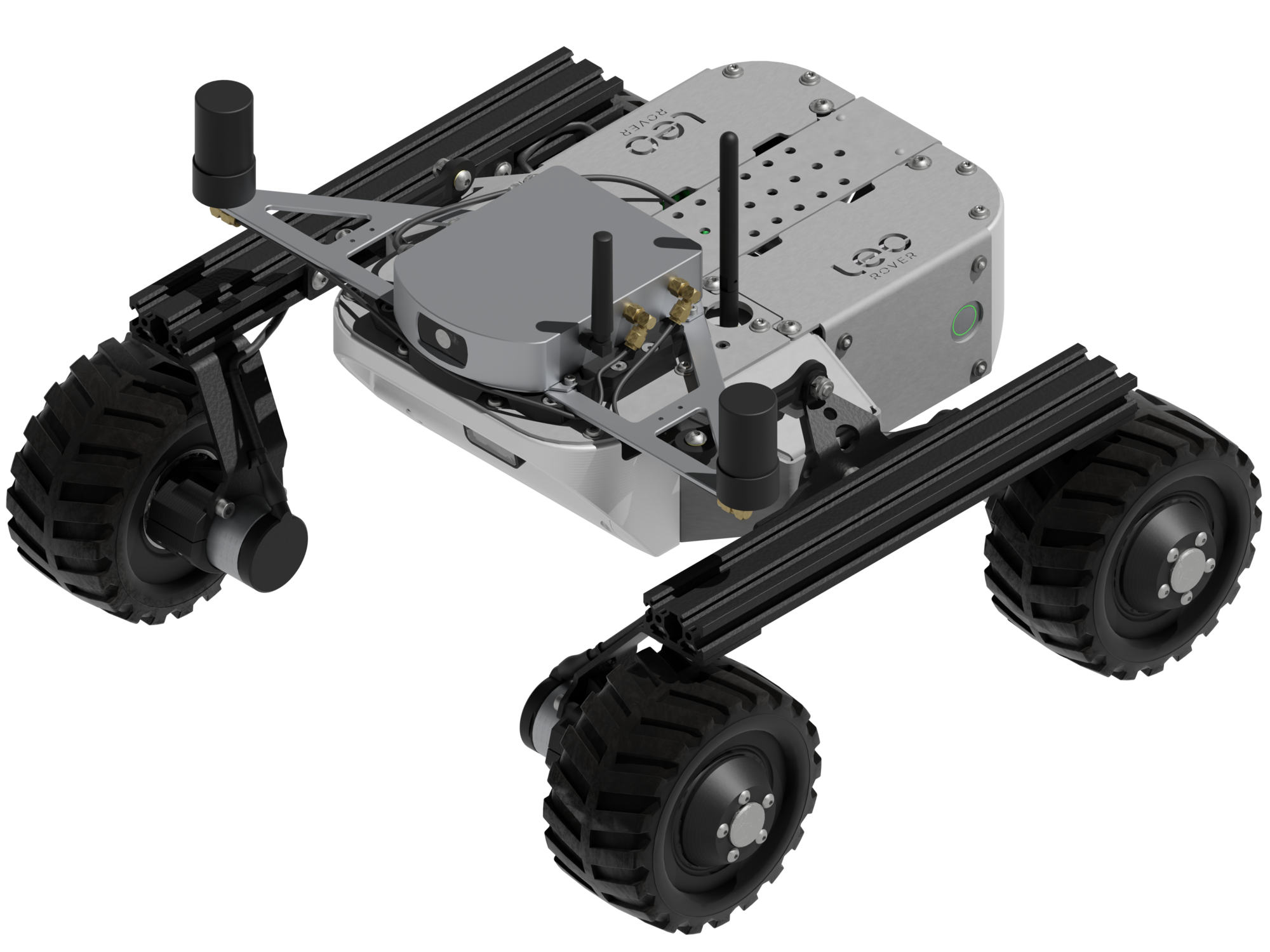

Multi-sensor RTK GNSS system with integrated vision and IMU, delivering centimeter-level positioning and reliable localization even in GNSS-denied environments. Perfect for enhancing mobile robot autonomy.
Main features
The Fixposition Vision-RTK 2 is a state-of-the-art positioning system combining dual-frequency RTK GNSS, a global-shutter camera, a 6-axis IMU, and optional wheel odometry. This fusion of sensors ensures continuous, highly accurate positioning even when GNSS signals are weak or temporarily lost — such as in urban areas, under trees, or inside large structures.
With a precision of 1 cm + 1 ppm, 0.4° heading accuracy, and up to 200 Hz output rate, the Vision-RTK 2 is ideal for mobile robots, autonomous vehicles, and outdoor survey platforms.
Key features:
- Position accuracy: 1 cm + 1 ppm (R50)
- Heading accuracy: 0.4° (with 1 m antenna baseline)
- Velocity accuracy: 0.05 m/s
- Drift during GNSS loss: <0.75% of traveled distance (with odometry input)
- Dual GNSS: GPS, GLONASS, Galileo, BeiDou, QZSS
- Global-shutter camera: 1280×800 px, 120° DFOV
- IMU: 6-axis accelerometer and gyroscope
- Optional wheel odometry input
- Max output rate: 200 Hz
- Interfaces: 2x UART, CAN, Ethernet, USB-C, Wi-Fi
- Power supply: 5–36 V DC, typical consumption ~7.5 W
- Operating temperature: –40°C to +85°C
- Dimensions: 113 x 130 x 30 mm (sensor), 65 x 72 x 17 mm (weatherproof housing)
- Weight: 420 g (weatherproof), 49 g (OEM board)
Applications in mobile robotics:
- Precise outdoor navigation
- Global positioning for SLAM
- Localization in GNSS-challenged areas
- Accurate heading and velocity estimation
Check the integration manual here:
https://docs.fictionlab.pl/integrations/noetic/positioning-systems/fixposition-vision-rtk-2